Software architecture
The functionnal architecture contains mainly two functions:
- a navigation functionality used to move the robot on the airport to reach runway extremities;
- a line following functionality used to follow the lights line at a constant speed for the lighting control.
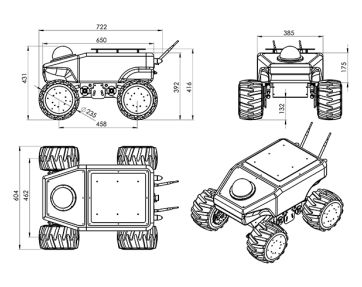
The software architecture is based on the control architecture embedded on an ONERA platform, Robotnik Summit-XL. The robot is equipped with a IMU (Inertial Measurement Unit), a GPS sensor, Hokuyo laser sensors and a video camera.